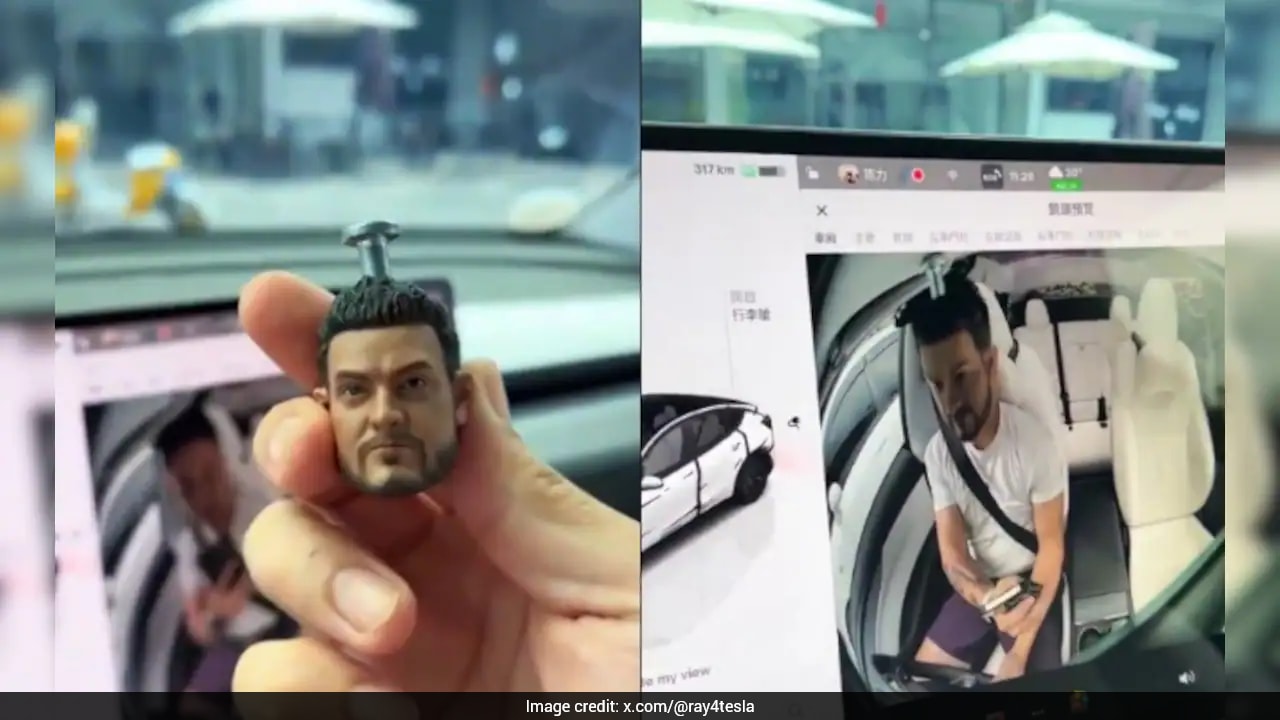
A consumer technology system is only as secure as its weakest edge case. In June 2026, reports emerged from global supply chains highlighting an absurd yet highly critical vulnerability in advanced driver-assistance systems (ADAS): aftermarket vendors are successfully bypassing Tesla’s driver monitoring systems using $30 plastic figurines. By placing static, three-dimensional replica heads—including those modeled after celebrity Dwayne "The Rock" Johnson—within the sightline of the cabin-facing camera, operators are neutralizing the vehicle’s primary attentiveness safeguards.
This exploit exposes a fundamental architecture flaw in consumer-grade computer vision. It reveals a critical imbalance between software-driven automation and physical-world verification. When an operator can engage Full Self-Driving (Supervised) or Autopilot and completely disengage attention for extended periods without triggering system alerts, the vehicle transitions from a supervised Level 2 system to an unmonitored hazard. To understand why this vulnerability exists, one must look past the novelty of the hardware and analyze the failure mechanics of the underlying neural networks. If you found value in this article, you might want to look at: this related article.
The Dual-Gate Architecture of Attention Verification
To prevent operator disengagement, modern semi-autonomous vehicular platforms rely on a two-factor validation framework designed to measure physical and visual presence.
[Driver Presence Verification System]
│
├──► Gate 1: Kinematic Feedback (Steering Wheel Torque Sensor)
│ └── Defeat Mechanism: Physical Counterweights / Magnetic Rings
│
└──► Gate 2: Optical Feedback (Cabin-Facing Infrared Camera)
└── Defeat Mechanism: Static 3D Figurines / Facial Proxies
1. The Kinematic Gate (Torque Verification)
Historically, the first line of defense against driver absence was the steering wheel torque sensor. Tesla systems do not measure surface touch or biometric presence on the steering wheel; instead, they register resistance to the automated steering column's micro-movements. The vehicle requires a baseline input of rotational force (measured in Newton-meters) to confirm that a human hand is resting on the wheel. For another angle on this story, check out the latest update from Wired.
The structural weakness of this system lies in its simple threshold logic. The sensor cannot differentiate between the dynamic, variable resistance of a human arm and a static mass. Third-party manufacturers exploited this by developing weighted magnetic rings and wheel-mounted counterweights. These devices apply continuous, unilateral gravitational force to the steering column, satisfying the minimum torque coefficient and eliminating what users refer to as the system’s "nag."
2. The Optical Gate (Gaze and Pose Estimation)
To mitigate the physical circumvention of torque sensors, vehicle manufacturers deployed cabin-facing, infrared-illuminated cameras. These cameras feed video data into a localized neural network trained to execute real-time object classification, facial detection, and gaze vector analysis. The system maps specific coordinates on the human face—such as the interpupillary distance, nose bridge position, and jawline structure—to confirm that the operator is seated in the primary console and looking at the road.
The current market exploit targets the structural assumptions of this optical gate. By mounting a miniature, three-dimensional head with distinct facial geometry near the rearview mirror or directly on the dashboard, users introduce a high-confidence positive artifact into the camera’s bounding-box algorithm.
The Mechanics of the Edge-Case Exploitation
The vulnerability stems from an optimization compromise within the computer vision pipeline. Neural networks trained on object detection rely on feature hierarchies. To classify a "driver," the system identifies basic geometric primitives (edges, curves), scales up to mid-level features (eyes, nose, mouth relationships), and finishes at high-level semantic structures (a forward-facing human head).
[Camera Input] ──► [Primitive Features] ──► [Semantic Structures] ──► [Classification Match]
(Edges & Curves) (Eyes, Nose, Mouth) (Driver Attentive)
▲
[3D Figurine Inserts]
When a 3D figurine mimicking human facial geometry is placed within the active zone of the sensor frame, the neural network registers a high-confidence match for a face. The failure occurs because the system lacks deep contextual validation layers.
- Absence of Liveness Detection: The camera classification engine verifies the presence of facial features but does not sufficiently calculate micro-expressions, skin-reflectance variability under changing light, or biological pupillary responses.
- Scale and Depth Multipliers: Depending on the camera's focal length and field of view, an object positioned closer to the lens can mimic the spatial dimensions of a human head positioned further back in the cabin. If the software lacks stereoscopic depth verification, it treats a small, nearby plastic head and a distant human head as structurally equivalent.
- Static Threshold Vulnerabilities: If the tracking algorithm is configured to accept a wide tolerance of immobility—to avoid penalizing drivers who stare straight ahead on long highway stretches—it inherently accepts a static plastic object as an attentive operator.
This creates a severe operational bottleneck. The hardware captures the image data, but the software abstraction layer misinterprets a static toy as an active safety supervisor.
The Autonomy Paradox and Human Risk Factors
The commercialization of Level 2 autonomy introduces a psychological feedback loop known as the automation paradox: the more reliable an automated system becomes, the less vigilant the human supervisor remains. Because the vehicle manages lane-keeping and velocity transitions with high precision in standard environments, human operators experience a rapid decay in situational awareness.
This operational decay alters the driver’s personal cost function. The perceived utility of multitasking (e.g., streaming video, eating, or text communication) quickly outweighs the perceived risk of system failure. Consequently, consumers actively seek aftermarket circumvention tools to eliminate safety interruptions.
The market response is a highly responsive supply chain of low-cost hardware. On electronic commerce hubs, these figurines are explicitly optimized to match the detection parameters of automotive cameras. When a driver replaces active physical monitoring with a static proxy, the systemic redundancy of the vehicle drops to zero. If the machine-learning model encounters a roadway anomaly it cannot resolve—such as an unmapped construction barrier or an overturned vehicle—the handover process fails entirely. The human is mentally and physically uncoupled from the controls, turning a predictable system edge case into an unmitigated collision event.
Systemic Remediation Frameworks
Resolving this vulnerability requires moving away from simple geometric object detection and implementing multi-layered biological and spatial validation systems. Manufacturers cannot rely on basic classification loops when operators are actively incentivized to spoof them.
1. Multi-Spectral Liveness Sensing
Software architectures must integrate active liveness verification algorithms. Instead of treating a static face vector as a valid input, the system must analyze photoplethysmography (PPG) signatures via optical sensors to detect blood flow patterns, or require minimum thresholds of micro-saccades (involuntary eye movements). A synthetic figurine made of polyvinyl chloride or resin exhibits a uniform infrared reflection coefficient; a living human face exhibits complex thermal and optical dispersion properties.
2. Spatial and Volumetric Temporal Tracking
The computer vision pipeline must tie face tracking directly to cabin ergonomics. The neural network should correlate the detected head position with weight sensors in the driver's seat and the volumetric depth data of the cabin interior.
[Spatial & Volumetric Verification Loop]
│
┌───────────────────────────┴───────────────────────────┐
▼ ▼
[Geometric Pass] [Context Validation]
Is a face detected? ──► YES Does position match seat weight? ──► NO
Is there physiological movement? ──► NO
│
▼
[System Failure Triggered]
If a high-confidence face is detected floating near the center console or rearview mirror without a corresponding mass in the driver's seat matrix, or if the object remains perfectly rigid relative to the vehicle chassis across a rolling time window, the system must invalidate the input and trigger an immediate safe-stop protocol.
3. Cross-Sensor Telemetry Correlation
A robust safety architecture must implement cross-verification between distinct sensor categories. If the steering column detects zero dynamic manual inputs over an extended baseline, yet the camera reports a perfectly stationary, forward-facing visage, a telemetry mismatch occurs. Human drivers inherently generate micro-corrections on a steering wheel and exhibit continuous torso adjustments due to vehicle inertia. The total absence of these physical vibrations alongside a positive visual affirmation indicates a system spoofing attempt.
Vehicular safety networks must treat all operator inputs as untrusted until validated by concurrent, multi-layered telemetry streams. Continuing to rely on isolated, easily simulated surface variables guarantees that aftermarket manufacturers will continue to outpace built-in safety controls.


